
Load Sharing in Generators: FAQs Answered
Load sharing in generators ensures multiple units work together efficiently, dividing power (kW) and reactive power (kVAR) based on capacity. This prevents overloads, reduces wear, and improves reliability. Synchronization is key - voltage, frequency, and phase must align before generators connect. Systems use either droop control (simple, allows frequency variation) or isochronous control (maintains constant frequency, requires communication). Proper setup and tuning are critical to avoid issues like uneven power distribution or reverse power. Industries like hospitals, data centers, and manufacturing rely on load sharing for uninterrupted operation and energy efficiency.
Parallel Operation of AC Generators | synchronizing | Load Sharing
What Is Load Sharing in Generator Systems?
Load sharing is a key concept when it comes to managing generator systems, especially those running in parallel. This section dives into how it works and why it’s essential for efficient operation.
Definition and Core Principles
In simple terms, load sharing refers to dividing electrical power proportionally among two or more generators connected to a common bus. Each generator takes on a share of the load based on its capacity. For example, if you have a 500 kW generator paired with a 1,000 kW generator, the smaller unit handles one-third of the total load, while the larger generator takes on the remaining two-thirds.
Two types of power need to be balanced in this process: active power (kW) and reactive power (kVAR). Each is controlled by a different system:
| Parameter | Managed By | Mechanism |
|---|---|---|
| Active Power (kW) | Engine Governor | Adjusts fuel input and engine speed |
| Reactive Power (kVAR) | Automatic Voltage Regulator (AVR) | Controls field excitation and output voltage |
As Jubaili Bros explains:
"Supplying more fuel keeps speed constant but increases kW; supplying more excitation keeps voltage constant but increases kVAr."
This distinction matters because it’s possible for the active power to be balanced while the reactive power is unevenly distributed. Such an imbalance might go unnoticed until problems like overheating arise.
Modern generator systems rely on advanced digital controllers, like the DSE 8610, to keep everything in check. These controllers use CANbus communication to make adjustments to fuel and excitation every 50–100 milliseconds. This ensures precise load sharing, typically achieving accuracy within ±2.0% for kW and ±5.0% for kVAR.
Why Load Sharing Matters
Proper load sharing offers several benefits:
- Prevents overloads: No single generator is overburdened, reducing the risk of failure.
- Extends equipment life: Wear and tear are distributed evenly across all units.
- Ensures reliability: N+1 redundancy keeps operations running smoothly, even if one generator fails.
Additionally, load sharing supports future growth. As power needs increase, more generators can be added to the system without overhauling the entire setup. This scalability makes it a practical solution for expanding operations.
How Load Sharing Works
For load sharing systems to operate safely, precise synchronization is the first and most crucial step.
Synchronization Requirements
Before generators can connect to a shared bus, they must align in terms of voltage, frequency, and phase. If synchronization isn't achieved, the generators can clash, leading to dangerous circulating currents. These currents can damage the windings, trip protective relays, or even cause catastrophic failures in seconds.
"Mismatched generators will fight each other electrically, producing circulating currents that can damage windings, trip protective relays, or cause catastrophic failure in seconds." - Turnkey Industries
To safely close the breaker, four key parameters must meet specific tolerances:
| Parameter | Typical Tolerance | What Controls It |
|---|---|---|
| Voltage Magnitude | ±1% to ±5% of bus voltage | Automatic Voltage Regulator (AVR) |
| Frequency | ±0.1 Hz to ±0.2 Hz | Engine Governor |
| Phase Angle | ±5° to ±10° (max ±15°) | Speed Bias / Synchronizer |
| Phase Sequence | Must match (e.g., ABC) | Verified during installation |
Among these, phase sequence is unique - it can't be adjusted by a controller during operation. It must be confirmed during installation to avoid severe mechanical damage.
Modern digital controllers handle real-time adjustments using CANbus communication. This ensures synchronization and balances the load, with the breaker closing at the precise point in the waveform cycle .
Once synchronization is achieved, control systems ensure the load is distributed evenly among the generators.
How Power Is Distributed
After synchronization, load sharing divides both active power (kW) and reactive power (kVAR) between the generators. Active power is managed by the engine governor, which adjusts fuel input - a generator running faster will take on more kW. Reactive power is controlled by the AVR, which modifies field excitation to adjust the generator's internal voltage and kVAR output .
Using CANbus communication, digital controllers exchange kW and kVAR data every 50 to 100 milliseconds. This constant recalibration keeps active power sharing within ±2.0% and reactive power sharing within ±5.0% of the rated output.
One critical safety feature in these systems is reverse power protection (ANSI 32). If a generator's prime mover fails while still connected to the bus, it can start drawing power from the other generators - this is called "motoring." A reverse power relay detects the issue and trips the breaker to prevent engine damage .
Load Sharing Methods
Droop vs. Isochronous Load Sharing: Key Differences Explained
When it comes to distributing power effectively, two main methods dominate: droop and isochronous load sharing. The choice between them hinges on the specific requirements of your system.
Droop Load Sharing
Droop load sharing adjusts the generator's frequency (or voltage) to drop slightly as the load increases. This creates a predictable slope - when one generator takes on more load, its speed decreases just enough to signal other generators to pick up their share. The beauty of this method lies in its simplicity - no direct communication between generators is needed, as the system naturally balances itself.
Typically, droop settings are standardized at 4% or 5%. For example, with a 4% droop setting, a generator operating at 60 Hz under full load will run at approximately 62.4 Hz when unloaded. While this small frequency variation simplifies the system, it does come at the cost of slightly reduced power quality.
"The droop system is considered to be more reliable than other systems due to its simplicity, but the price of this reliability is the loss in power quality." - Consulting-Specifying Engineer
Droop is the preferred method when paralleling with a utility grid, as all generators must conform to the grid's fixed frequency. It also works well with generators of varying sizes or from different manufacturers, as it doesn't rely on specific communication protocols. However, it's critical to ensure all generators in a droop system share the same droop percentage. If they don't, one generator may become overloaded while others remain underutilized.
Isochronous Load Sharing
Isochronous control, on the other hand, ensures a constant frequency regardless of load changes. The system continuously monitors generator performance and adjusts fuel and excitation to maintain stable frequency and voltage.
This method requires a high-speed communication network, such as CANbus or RS-485, along with compatible hardware. While this increases system complexity and cost, it ensures tight control over frequency stability. Controllers like the Woodward EGCP-2 Plus are commonly used for this purpose, with prices ranging from $3,000 to $5,000 per generator.
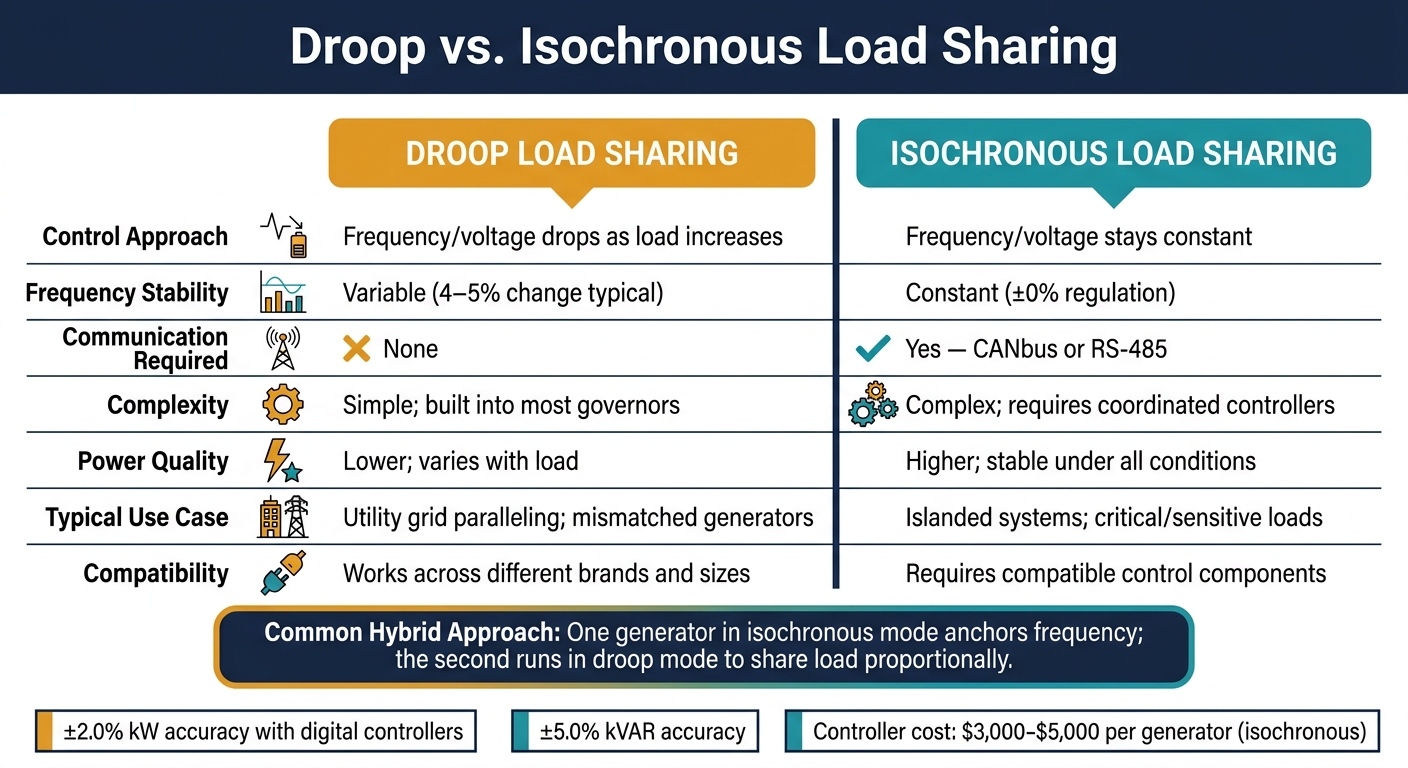
A common approach for two-generator islanded systems combines both methods: one generator operates in isochronous mode to anchor the frequency, while the other runs in droop mode to share the load proportionally. This setup prevents the instability that can occur when two generators attempt to independently maintain fixed frequency references.
"Two generators cannot reliably run in pure isochronous mode together without a superior controller. Each governor would fight to maintain its own fixed speed reference, causing instability." - Industrial Monitor Direct
Droop vs. Isochronous: A Side-by-Side Comparison
| Feature | Droop Load Sharing | Isochronous Load Sharing |
|---|---|---|
| Control Approach | Frequency/voltage decreases as load increases | Frequency/voltage remains constant |
| Frequency Stability | Variable (4–5% change typical) | Constant (±0% regulation) |
| Communication Required | None | Yes (e.g., CANbus, RS-485) |
| Complexity | Simple; built into most governors | More complex; requires coordinated controllers |
| Power Quality | Lower; frequency/voltage varies with load | Higher; stable output under all conditions |
| Typical Use Case | Utility grid paralleling; mismatched generators | Islanded systems; critical or sensitive loads |
| Compatibility | Works across different brands and sizes | Requires compatible control components |
sbb-itb-501186b
Factors That Affect Load Sharing Performance
Compatibility and Setup Requirements
Getting load sharing right starts long before generators are running in parallel. The engine governor, which controls kW through fuel and speed, and the AVR (Automatic Voltage Regulator), which manages kVAR through excitation, must work together seamlessly. If these systems aren’t properly configured, you risk destabilizing the entire setup.
A frequent issue arises when digital controllers from different manufacturers are mixed. These controllers rely on identical communication protocols for CANbus data exchange. Using controllers that aren’t aligned can lead to communication breakdowns. Analog load-sharing systems, on the other hand, are generally more flexible when combining equipment from different manufacturers. If you’re working with mixed setups, sticking to analog systems or employing a master/follower configuration can help avoid compatibility headaches.
Another critical step is field tuning during commissioning. Factory settings, while a good starting point, rarely account for site-specific variables like cable impedance, switchgear arrangements, and sensor scaling. Skipping this step can lead to operational issues, many of which are covered in the next section.
Common Problems and How to Fix Them
Even a meticulously planned system can run into trouble over time. Below is a quick guide to some common load sharing problems and their likely causes:
| Problem | Likely Cause |
|---|---|
| Uneven power distribution | Mismatched droop settings or incorrect load measurement scaling |
| Load hunting/oscillation | Overly aggressive governor gains or slow actuator response |
| Circulating reactive currents | Uncoordinated AVRs or mismatched excitation systems |
| Unexpected breaker trips | Synchronization conditions not met before breaker closure |
| Reverse power | Insufficient fuel delivery to one unit or a smaller generator overloaded by a larger unit |
If you’re dealing with uneven power distribution, start by checking the polarity and accuracy of your CT (Current Transformer) and PT (Potential Transformer) connections before making any adjustments to control settings.
Reverse power is another critical issue. It happens when a generator, due to reduced fuel delivery, starts absorbing power from the bus (a condition known as motoring). This can lead to serious engine damage. Installing a reverse power relay (ANSI Device 32) is a vital precaution - it trips the breaker before any harm occurs. This protection is especially important for smaller generators operating alongside larger ones, where the risk of overload is higher.
Where Load Sharing Is Used
Industries and Facilities That Use Load Sharing
Load sharing plays a vital role in industries where maintaining continuous power isn't just important - it's critical. It ensures operations remain uninterrupted, even in the most demanding environments.
Take hospitals, for example. Here, power gaps are simply unacceptable. Life-support systems, operating rooms, and diagnostic machines rely on consistent electricity. Hospitals typically use three generators in parallel with N+1 redundancy. This means two generators handle the regular load while the third is on standby, ready to step in if one needs maintenance. This setup ensures patient care continues without a hitch.
Data centers are another prime example. The stakes are incredibly high, as downtime can lead to massive financial losses, hardware damage, and broken service agreements. As the React Power Team aptly put it:
"When a hospital loses power, seconds matter. When a data center goes dark, millions of dollars are at risk."
To avoid such risks, data centers rely on N+1 or N+2 redundancy, with automatic controllers ensuring their systems stay synchronized and operational at all times.
Beyond these critical industries, load sharing is applied across various sectors:
- Manufacturing & Industrial Plants: Keeps production lines and heavy machinery running smoothly, avoiding costly interruptions.
- Marine & Offshore: Smaller, flexible units enhance safety and operational efficiency.
- Hotels & Resorts: Adjusts power output based on occupancy, helping manage demand and reduce fuel consumption.
- Telecommunications & Banking: Guarantees 24/7 operational continuity for communication networks and financial transactions.
- Airports & Large Infrastructure: Supports essential operations where reliability is non-negotiable.
These examples highlight how load sharing is about more than just keeping the lights on - it’s about optimizing performance. By maintaining generators near their most efficient operating range, load sharing reduces fuel consumption and enhances overall efficiency.
It also provides flexibility for maintenance, allowing operations to continue seamlessly when one generator is offline. Across industries, load sharing ensures reliability while maximizing efficiency, proving itself indispensable in mission-critical applications.
Key Takeaways on Load Sharing
Load sharing plays a critical role in ensuring that parallel generator systems operate both reliably and efficiently. By distributing kW and kVAR evenly across units, it helps maintain performance while reducing unnecessary strain on individual generators.
Here are some important insights:
- Operating multiple generators at 60–80% of their rated load is significantly more efficient than running a single oversized unit at just 30% capacity.
- Modern digital controllers offer impressive accuracy, maintaining active power sharing within ±2.0% and reactive power within ±5.0% of rated output.
- Properly optimized systems can cut fuel consumption by up to 20%, while poor management can lead to efficiency losses of up to 15%.
When it comes to control methods, droop control is ideal for simplicity, while isochronous control is better suited for applications requiring precise frequency regulation. The choice between the two depends entirely on the specific needs of your system.
"Load sharing ensures reliability by balancing demand and preventing generator overloads." - StandByGeneratorHQ
The key takeaway? Selecting the right load sharing strategy and equipment is essential for achieving optimal performance. If you're planning a parallel generation setup, you'll need the right technology and components. For sourcing power generation tools and electrical equipment, Electrical Trader offers a range of options, from generators to advanced control systems, making it a convenient starting point for your project.
FAQs
Can I load share generators of different sizes or brands?
Connecting multiple generators can indeed be complex, as it requires meticulous alignment of voltage, frequency, and phase rotation at the connection point. Any mismatch in these parameters can lead to instability or even damage to the equipment.
To address these challenges, droop control is often employed when working with generators of differing types or sizes. For situations demanding more precise synchronization, isochronous control or a master-slave configuration may be necessary to ensure smooth operation.
It's crucial to consult the generator manufacturer before attempting integration. This helps confirm that the control governors and voltage regulators are properly configured for safe and efficient operation.
How do I choose droop vs. isochronous load sharing?
Droop is a straightforward and dependable option for load sharing. As the load on a generator increases, its speed or voltage naturally decreases. This allows multiple generators to share the load proportionally without needing exact matching, making it a practical choice in many scenarios.
On the other hand, isochronous control is ideal when maintaining a constant frequency is essential. In this setup, one generator is responsible for keeping the frequency steady, while the others use isochronous controls to share both kW and kVAr. This approach ensures a consistent bus frequency and delivers better power quality overall.
What settings should I check first if one generator is taking most of the load?
If one generator is shouldering most of the load, start by confirming that all paralleled generators share the same droop percentage settings. Discrepancies in real power (kW) are often linked to mismatched governor or fuel rate settings. On the other hand, reactive power (kVAR) issues usually arise from differences in AVR excitation or incorrect reactive droop compensation. Additionally, double-check the current transformer (CT) polarities, as reversed polarity can lead to excessive reactive power.





