EtherNet/IP vs EtherCAT: Which to Choose?
When deciding between EtherNet/IP and EtherCAT, the right choice depends on your application's needs:
- EtherNet/IP is ideal for general industrial automation, IT integration, and systems using standard Ethernet hardware. It’s widely used in North America, especially with Rockwell Automation systems, and works well in environments where millisecond-level performance is sufficient.
- EtherCAT excels in high-speed motion control, robotics, and systems requiring microsecond-level precision. Its on-the-fly processing ensures ultra-fast cycle times, making it a top choice for applications demanding real-time performance.
Quick Comparison:
| Feature | EtherNet/IP | EtherCAT |
|---|---|---|
| Speed | Millisecond range (1–10 ms) | Microsecond range (<100 µs) |
| Synchronization | Requires CIP Sync | Native (<1 µs) |
| Topology | Star, Tree, Ring | Line, Daisy-chain, Ring |
| Hardware | Standard Ethernet gear | Specialized ASICs for slaves |
| Best For | General automation | High-speed motion control |
If you prioritize compatibility with IT systems, go with EtherNet/IP. For speed and precision, EtherCAT is the better option.
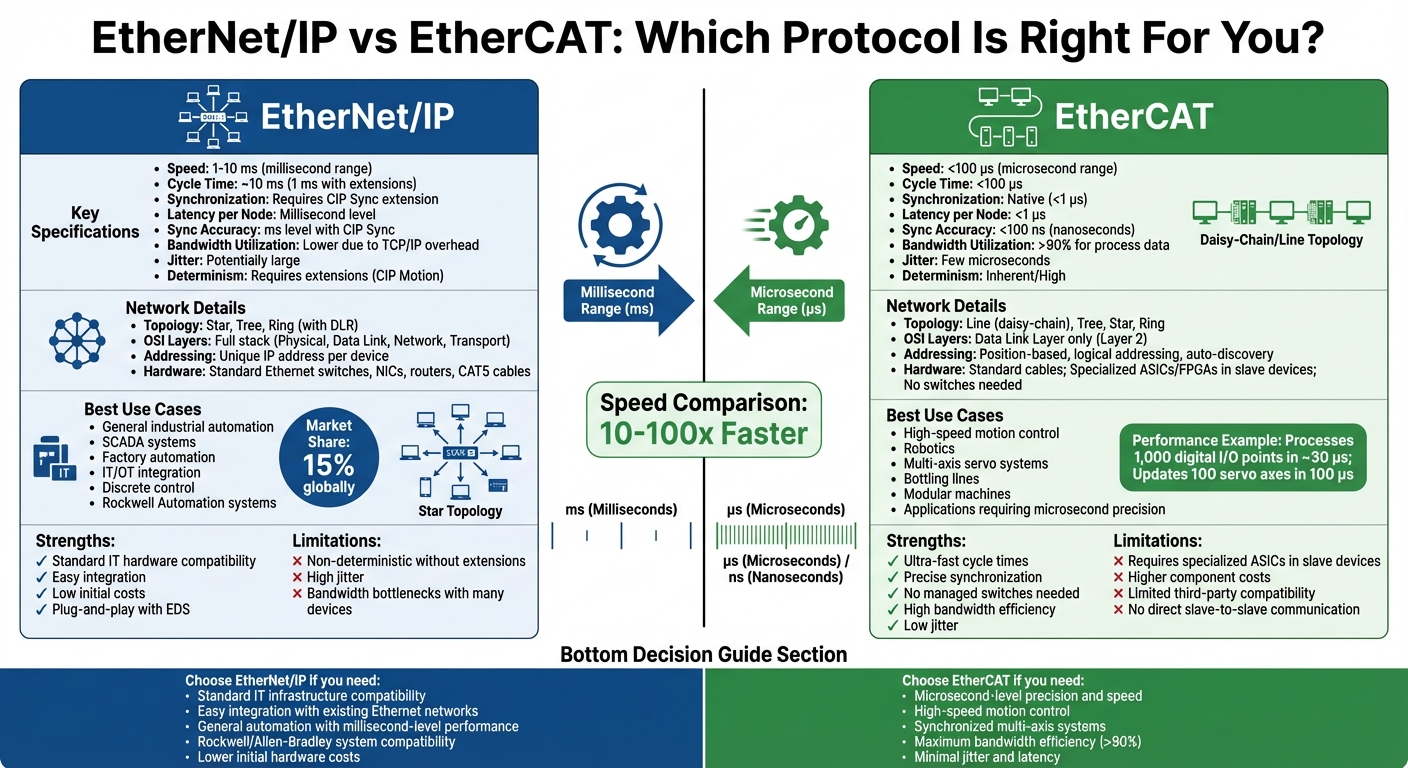
EtherNet/IP vs EtherCAT Protocol Comparison Chart
EtherCAT vs EthernetIP - Which One Is Best? | KEB Shorts
sbb-itb-501186b
Technical Differences Between EtherNet/IP and EtherCAT

The main distinction between these two protocols lies in their operation within the OSI networking model. EtherNet/IP utilizes the full Ethernet stack, including the Physical, Data Link, Network, and Transport layers, to transmit CIP messages. On the other hand, EtherCAT operates exclusively at the Data Link Layer, skipping the network and transport layers to minimize overhead.
OSI Layer Operations
This difference in architecture significantly impacts how devices are addressed and integrated into networks. EtherNet/IP requires each device to have a unique IP address, aligning it with standard IT systems. EtherCAT, however, takes a different approach by identifying devices based on their physical sequence, logical addressing, and an auto-discovery process during startup.
"EtherCAT identifies devices through logical addressing, physical order of devices, and auto-discovery during initialisation. So, it directly works on layer 2 of the OSI model and bypasses transport and network layers." - Instrumentation Tools
Communication Mechanisms
The way these protocols handle data transfer further highlights their differences. EtherNet/IP relies on an object-oriented, producer-consumer CIP model. It uses "Explicit" TCP messaging for non-critical data and "Implicit" UDP messaging for real-time I/O. This method requires devices to fully process packets through the entire networking stack.
EtherCAT, in contrast, employs real-time, on-the-fly data processing. A single Ethernet frame is passed sequentially through all nodes, with each slave device extracting its specific data and adding new information via specialized hardware (ASIC). This process is highly efficient, with delays kept under 1 µs, allowing the system to handle 1,000 digital I/O points in roughly 30 µs.
The hardware requirements for these protocols also reflect their differing designs. EtherNet/IP can function with standard Ethernet switches and network interface cards, making it a relatively affordable option. EtherCAT, however, requires devices equipped with specialized ASICs or Fieldbus Memory Management Units (FMMUs) to enable on-the-fly processing. While this adds to the cost of individual components, it eliminates the need for network switches.
Performance and Speed Comparison
When it comes to raw speed, EtherCAT leaves EtherNet/IP trailing behind. The technical distinctions between these two protocols directly influence their cycle times and latency, creating a noticeable performance gap.
Cycle Times and Latency
EtherCAT operates in the microsecond (µs) range, typically achieving cycle times under 100 µs. For example, it can process 1,000 digital I/O points in about 30 µs and update 100 servo axes within 100 µs. On the other hand, EtherNet/IP works in the millisecond (ms) range, with response times varying from 1 to over 10 ms. This makes EtherCAT approximately 10 to 100 times faster for most use cases.
The speed difference comes from how each protocol processes data. EtherCAT employs hardware-based "on-the-fly" processing, introducing less than 1 µs of delay per node. In contrast, EtherNet/IP relies on full-stack processing and switch routing, which add significant overhead. EtherCAT also achieves synchronization accuracy of less than 100 nanoseconds (ns) using Distributed Clocks, while EtherNet/IP requires CIP Sync to reach a similar level of precision.
"For motion control applications, EtherCAT is clearly the winner in performance. It's designed for low jitter and real-time performance without any special hardware."
– Jonathan Bullick, KEB America
A practical study by P. A. Manoj Kumar and B. Sathish Kumar (2013) tested these protocols in an electrostatic precipitator system with 72 nodes across four precipitators, where alerts needed to be sent in under one second. EtherCAT met the timing requirements without issue, while EtherNet/IP needed ultra-high-performance scanners - specialized hardware - to achieve comparable results.
This stark contrast in performance lays the groundwork for a deeper dive into specific metrics.
Performance Metrics Comparison Table
Here’s a side-by-side comparison of key performance metrics for EtherCAT and EtherNet/IP:
| Performance Metric | EtherCAT | EtherNet/IP |
|---|---|---|
| Cycle Time | <100 µs (µs range) | 1–10+ ms (ms range) |
| Latency per Node | <1 µs | ms level |
| Synchronization Accuracy | <100 ns | ms level (with CIP Sync) |
| Bandwidth Utilization | >90% for process data | Lower due to TCP/IP overhead |
| Jitter | Few microseconds | Potentially large |
| Determinism | Inherent/High | Requires extensions (CIP Motion) |
EtherCAT’s efficiency stands out, with over 90% of its network bandwidth dedicated to process data, thanks to its single-frame communication method. This design not only reduces latency but also prevents network congestion, which can be a significant issue for EtherNet/IP systems as the number of devices increases. In demanding environments, EtherCAT’s streamlined approach ensures smooth and reliable operation, even as systems scale.
Topology, Hardware, and Implementation
When designing a system, factors like topology, hardware, and implementation play a crucial role alongside performance. EtherNet/IP and EtherCAT differ significantly in these areas, influencing how systems are built and deployed.
Network Topology
EtherNet/IP primarily relies on star and tree topologies, with the option to use Device Level Ring (DLR) for redundancy. Each device on the network needs a unique IP address and must adhere to a specific subnet structure.
On the other hand, EtherCAT offers more flexibility and supports line (daisy-chain), tree, star, and ring configurations. The line topology is especially popular because it connects devices sequentially without requiring network switches. EtherCAT uses position-based addressing, which is a natural fit for its daisy-chain structure.
"EtherCAT eliminates the need for a network switch. This closed-loop system ensures commands are delivered but the last device on the network might experience a delay." – Patrick Teagues, Product Development Analyst, MISUMI
These topology differences directly affect hardware choices and how the system is deployed.
Hardware Requirements
EtherNet/IP systems rely on widely available Ethernet hardware, such as network interface cards, switches, routers, and CAT5 cables. This accessibility keeps initial costs low and makes finding replacement parts easy. However, for larger networks, managed switches are often necessary to handle traffic and avoid bottlenecks. Rockwell PLCs using EtherNet/IP typically operate with packet sizes around 500 bytes.
EtherCAT, while also using standard Ethernet cables and connectors, requires each slave device to include an ASIC or FPGA. Although this adds an upfront cost, it eliminates the need for expensive managed switches, potentially reducing overall system expenses. The master controller can be implemented in software on any standard Ethernet MAC, eliminating the need for specialized communication coprocessors.
Implementation Complexity
EtherNet/IP is easier to implement, thanks to its reliance on familiar TCP/IP protocols. Its use of Electronic Data Sheets (EDS) allows for straightforward plug-and-play integration, especially with Rockwell Automation and Allen-Bradley systems. This simplicity makes it a good fit for teams already familiar with standard IT infrastructure.
EtherCAT, by contrast, demands a deeper understanding of its unique data link layer operations and the configuration of dedicated slave controllers. However, once set up, its daisy-chain topology simplifies cabling compared to star networks that require multiple switches. Additionally, EtherCAT's availability as open-source code can make the implementation process more accessible.
Strengths, Limitations, and Use Cases
When comparing EtherNet/IP and EtherCAT, their practical strengths and limitations reveal which scenarios each protocol is best suited for. Let’s break this down.
EtherNet/IP: Strengths and Use Cases
One of EtherNet/IP's standout features is its compatibility with standard IT hardware. Because it uses the same infrastructure as office networks - like switches, routers, and CAT5 cables - it's easy to integrate into existing systems and familiar to IT teams. This also helps keep setup costs low. Globally, it holds about 15% of the market share.
The protocol also shines in environments where seamless integration is key. By leveraging Electronic Data Sheets (EDS), EtherNet/IP simplifies plug-and-play setups, making it a go-to choice for factory automation and SCADA systems.
That said, there are some trade-offs. Basic implementations of EtherNet/IP are non-deterministic, which means they can experience high jitter. To handle high-performance motion control, extensions like CIP Motion and CIP Sync are required. Additionally, as more devices are added to the network, bandwidth limitations can lead to bottlenecks.
"The sweet spot for EtherNet/IP is discrete control. You can make it work in process control, but that's like using your Cadillac to haul rocks for your wife's rock garden."
– John Rinaldi, CEO of Real Time Automation
While EtherNet/IP is excellent for compatibility and ease of use, it struggles in time-sensitive applications where speed is critical. This is where protocols like EtherCAT take the lead.
EtherCAT: Strengths and Use Cases
If speed and precision are the priority, EtherCAT is a clear contender. Its "processing-on-the-fly" approach enables cycle times faster than 100 µs, with synchronization accuracy below 1 µs. Impressively, it devotes over 90% of its bandwidth to actual process data.
EtherCAT also keeps costs in check by eliminating the need for pricey managed switches, thanks to its daisy-chain topology. This makes it a natural fit for robotics, multi-axis motion systems, and modular machines where precise synchronization is essential.
"For motion control applications, EtherCAT is clearly the winner in performance. It's designed for low jitter and real-time performance without any special hardware."
– Jonathan Bullick, KEB America
A 2013 study further validated EtherCAT's ability to handle real-time control across multiple nodes, meeting sub-second performance requirements with less complexity than EtherNet/IP.
However, EtherCAT isn't without its drawbacks. Every slave device needs specialized ASICs or FPGAs, which can increase hardware costs and limit third-party device compatibility compared to EtherNet/IP. Additionally, its master-slave architecture prevents direct communication between slave devices.
Pros and Cons Comparison Table
| Feature | EtherNet/IP | EtherCAT |
|---|---|---|
| Primary Strength | Broad IT compatibility | Superior speed and synchronization |
| Primary Limitation | High jitter; non-deterministic without extensions | Requires specialized ASICs in slave devices |
| Hardware | Standard Ethernet switches/NICs | Master: Standard NIC; Slave: Specialized ASICs |
| Cycle Time | ~10 ms (1 ms with extensions) | <100 µs |
| Synchronization | Requires CIP Sync extension | <1 µs native |
| Topology | Star, Tree, Ring (with DLR) | Line, Daisy-chain, Ring, Tree |
| Best For | General automation, SCADA | High-speed motion control, robotics |
| Safety Protocol | CIP Safety (SIL3) | FSoE (SIL3) |
Both protocols bring distinct advantages to the table, making the choice between them largely dependent on the specific needs of your application.
How to Choose Between EtherNet/IP and EtherCAT
Decision-Making Factors
When deciding between EtherNet/IP and EtherCAT, start by considering the speed and control needs of your system. If you're working on high-speed, synchronized motion control tasks - like robotics or bottling lines - EtherCAT's sub-100 µs cycle times are a perfect match. For more standard PLC systems, SCADA, or applications where millisecond-level response is enough, EtherNet/IP offers dependable performance without requiring specialized hardware.
Your existing infrastructure also plays a big role. EtherNet/IP integrates smoothly with standard IT equipment like switches, routers, and CAT5 cabling, making it a practical choice for systems already using this protocol. On the other hand, EtherCAT often demands specialized ASIC or FPGA chips in slave devices. While this can raise component costs, it eliminates the need for pricey managed switches.
Network topology is another factor to weigh. EtherNet/IP works well with star or tree layouts that rely on standard Ethernet switches. EtherCAT, however, shines in line, daisy-chain, or ring topologies, which can simplify cabling for modular machine setups. Keep in mind, though, that this may require you to rethink your current physical layout.
"EtherNet/IP is the way that all Rockwell Logix Controllers connect field devices. It is the most widely used application layer manufacturing protocol in North America."
– John Rinaldi, CEO, Real Time Automation
Lastly, ensure device compatibility. Check that your intended sensors, actuators, and drives are available for the protocol you choose. Once you've made your decision, sourcing the right components becomes the next step.
Finding Compatible Components on Electrical Trader
Once you've nailed down your protocol requirements, you’ll need compatible hardware. Electrical Trader (https://electricaltrader.com) is a great resource for both new and used electrical components designed for EtherNet/IP and EtherCAT systems.
For EtherNet/IP systems, you’ll find Rockwell PLCs, industrial Ethernet switches, HMIs, standard interface cards, breakers, transformers, and power distribution equipment that integrate seamlessly with your setup.
For EtherCAT systems, look for specialized hardware like servo drives, IPCs, remote I/O modules, and EtherCAT terminals. The marketplace also stocks industrial-grade cabling, including shielded CAT5/CAT5e cables with RJ45 or M12 connectors, along with fiber optic components for longer runs over 100 meters. Whether you're building a new system or upgrading an existing one, having access to both new and used components helps you manage costs while ensuring everything works together smoothly.
Conclusion
Summary of Key Differences
Deciding between EtherNet/IP and EtherCAT depends largely on the specific needs of your application. EtherCAT shines in scenarios requiring ultra-fast motion control and robotics, thanks to its sub-100 µs cycle times and precise synchronization capabilities. Its "processing-on-the-fly" approach enables data to pass through all nodes in a single telegram, using over 90% of network bandwidth for process data. This makes EtherCAT a strong contender for applications where microsecond-level timing is non-negotiable.
On the other hand, EtherNet/IP is a go-to solution for large-scale industrial automation, particularly when IT/OT integration is a priority. Built on standard Ethernet protocols (IEEE 802.3 and TCP/IP), it seamlessly integrates with existing IT infrastructure, including switches, routers, and standard cabling. It's particularly well-suited for environments like Rockwell Automation systems and SCADA setups, where millisecond-level performance is sufficient.
From a hardware perspective, EtherNet/IP relies on readily available Ethernet components, while EtherCAT requires specialized ASIC or FPGA chips in slave devices. This eliminates the need for managed switches in EtherCAT setups. Network topology also plays a role - EtherNet/IP supports star or tree configurations, while EtherCAT simplifies cabling with its daisy-chain design.
Understanding these distinctions is key to aligning your protocol choice with your system's operational needs.
Next Steps
With the differences between these protocols outlined, the next move is to align your hardware choices with the protocol that fits your requirements. For EtherNet/IP systems, this might mean sourcing Rockwell PLCs and standard Ethernet switches. For EtherCAT setups, specialized servo drives and EtherCAT terminals are essential for high-speed motion control. Balancing performance needs with budget considerations is critical, and sourcing both new and used equipment can help achieve that.
Electrical Trader (https://electricaltrader.com) provides a broad range of hardware options tailored to both protocols. From breakers and transformers to industrial cabling and power distribution equipment, the platform offers solutions for new installations as well as upgrades, ensuring you have access to the right tools for the job.
FAQs
Can EtherNet/IP handle motion control well enough for my machine?
EtherNet/IP is capable of managing motion control, but how well it works depends on the demands of your machine. It's a solid choice for typical industrial automation and process control tasks, thanks to its compatibility with most PLCs and HMIs. That said, if you're dealing with high-speed, real-time motion applications - like robotics or multi-axis systems - EtherCAT tends to be a better fit because of its lightning-fast response times and precise synchronization. The right choice comes down to your specific performance needs.
What makes EtherCAT faster than EtherNet/IP in real systems?
EtherCAT achieves higher speeds by employing a "processing on the fly" technique. This means data is passed along to the next node even before it’s fully processed, cutting down delays and ensuring lower jitter. This makes it an excellent choice for real-time motion control systems. On the other hand, EtherNet/IP uses the Common Industrial Protocol (CIP) to process data sequentially. While effective, this approach introduces latency, making it less suitable for tasks where timing is critical.
What hardware changes are needed to switch from EtherNet/IP to EtherCAT?
Switching to EtherCAT involves more than just a simple software update - it requires hardware changes too. For starters, you'll need to replace standard network interface cards (NICs) with ones that are EtherCAT-compatible. Beyond that, the devices and switches in your setup must support EtherCAT's specific topologies, such as ring or line configurations.
Additionally, EtherCAT relies on specialized I/O modules and slave devices designed to handle its unique data frames. These components are essential for achieving the real-time data exchange that EtherCAT is known for, setting it apart from the standard Ethernet devices typically used with EtherNet/IP.